XCP is based on the Master-Slave principle
Measurement and calibration tool is the master
Master can communicate with many slaves simultaneously
ECU is the slave
Slave can only communicate with one master at a given time
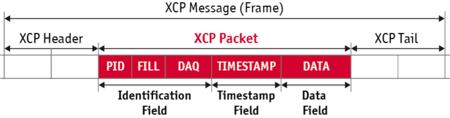
XCP data is exchanged in a message-based way
XCP packet is embedded in a frame of the transport layer
Frame consists of three parts:
•XCP header
•XCP packet
•XCP tail
XCP header and XCP tail depends on the transport protocol
XCP packet is independent of the transport protocol
It always contains three components:
•Identification field
•Timestamp field
•Data field (with payload)
Type of communication via XCP packets is subdivided into
•One range for commands (CTO)
•One range for sending synchronous data (DTO)
XCP handler and XCP resources: |
|
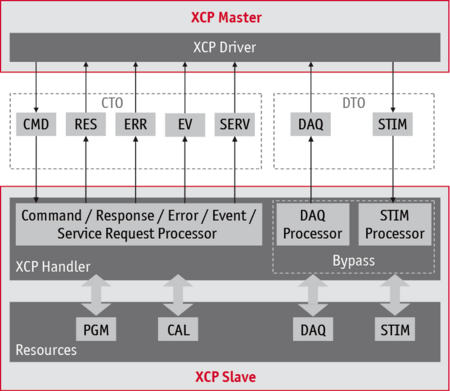
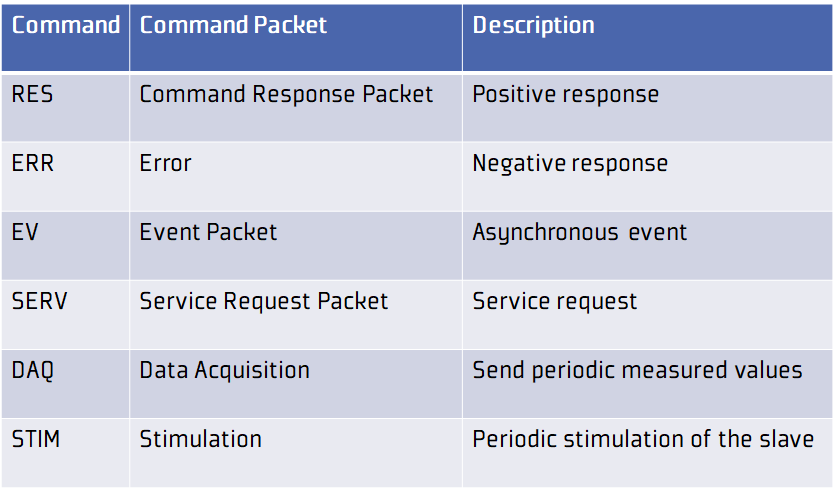
Commands are exchanged via CTOs
(Command Transfer Objects)
•Master initiates contact
•Slave must respond to a CMD with RES or ERR
•The other CTO messages are sent asynchronously
The Data Transfer Objects (DTO) are used
•To transfer synchronous measurement
•For stimulation data